Force measurement
Force measurement is the determination of the force acting between two bodies. Mechanical, hydraulic or electronic force transducers are used for this purpose, which are also referred to as force gauges, load cells, force sensors or dynamometers , depending on their design .
In a broader sense, the term force measurement is also applied to testing devices such as universal testing machines that deform the measurement object with a defined, adjustable force in order to test material and material properties or mechanical properties of components.
Types of force measurement
Direct force measurement
With direct force measurement, the force transducer is installed exactly in the force axis between two bodies (or machine elements).
One body is usually fixed and the other is moved in the force axis. In this way, uniaxial force transducers can measure the resulting force in the direction of movement unidirectionally (only tension or only compression) or bidirectionally (tension and compression).
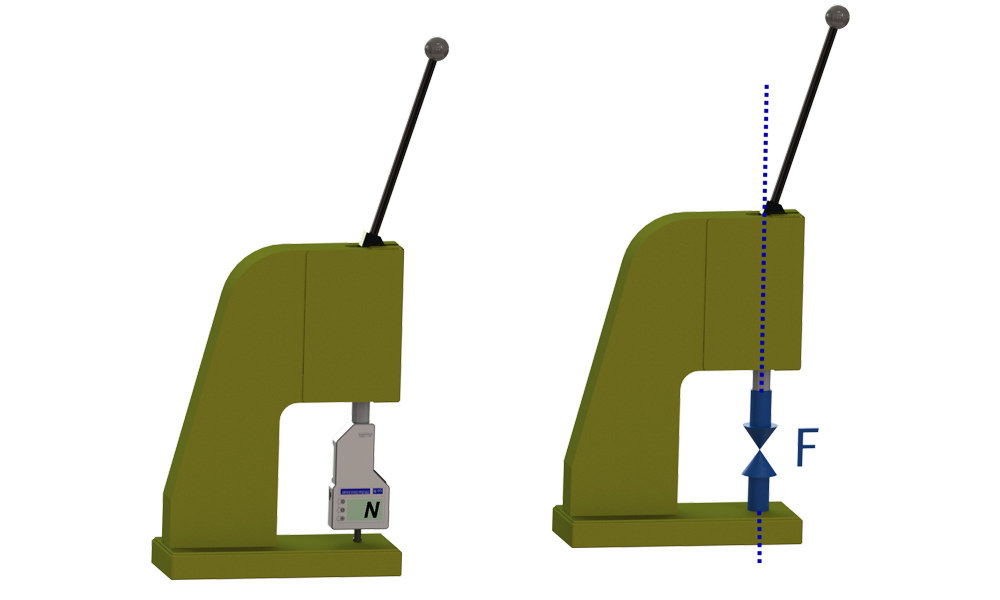
Example: Direct force measurement with a force gauge in the force axis of a lever press
Indirect force measurement
One speaks of an indirect force measurement when the force transducer for determining the force shunt is not used directly in the force axis but offset, for example on a machine frame.
It should be noted that with this indirect method, the force transducer should not be adjusted and linearized independently of the overall system, and a force shunt does not necessarily represent a proportional (linear) part of the force between two bodies.
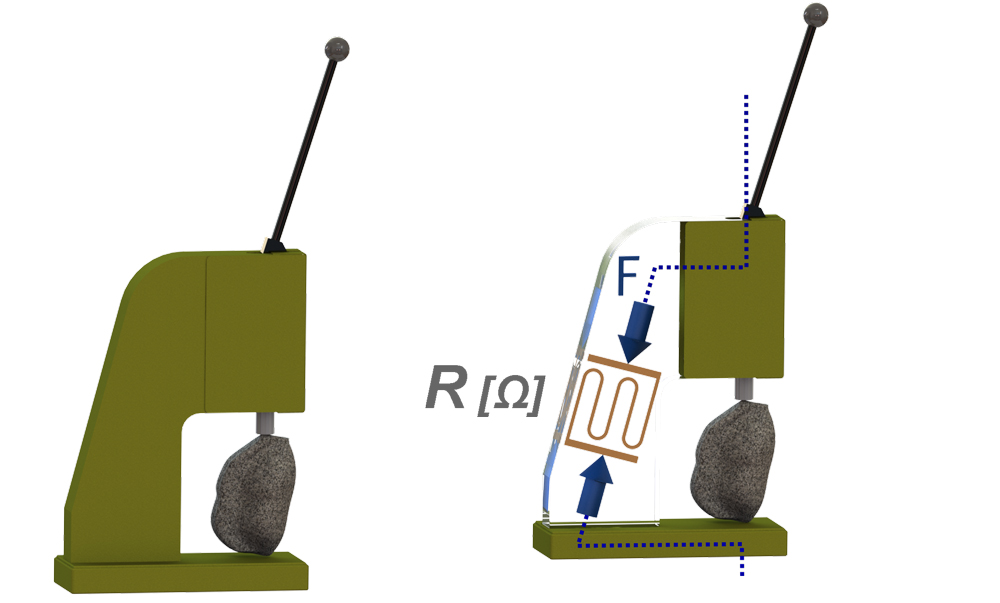
Example: Indirect force measurement - deformation of a press frame
Torque measurement (Momentum = motive force)
If the length of the lever arm is known , the torque can also be recorded by measuring the force. With this procedure, with the greatest possible exclusion of parasitic force influences, torque sensors can be adjusted and calibrated with the help of masses.
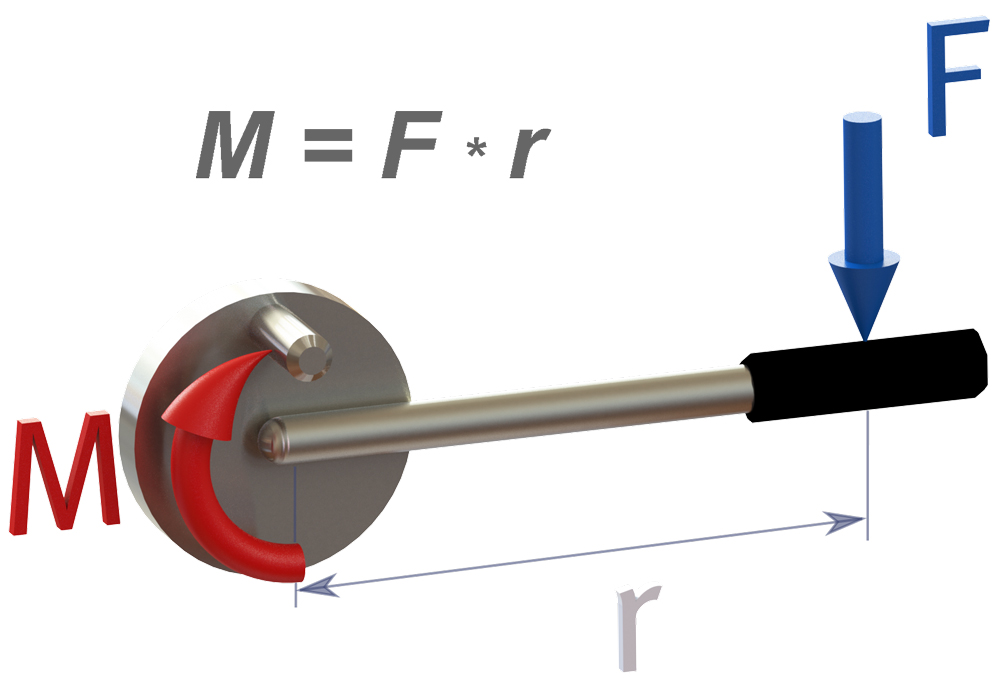
Schematic sketch: Torque shown as a force acting on a lever arm
Acceleration measurement (force of inertia)
To measure acceleration, one of the two bodies is integrated as a mass in the sensor element of the measuring device.
Force as a vector quantity
Multi-axis force measurement
Force is a vector quantity that can act in all three directions of space. Multi-axis force transducers offer the possibility of evaluating the X, Y and Z components and, if necessary, the respective torque.
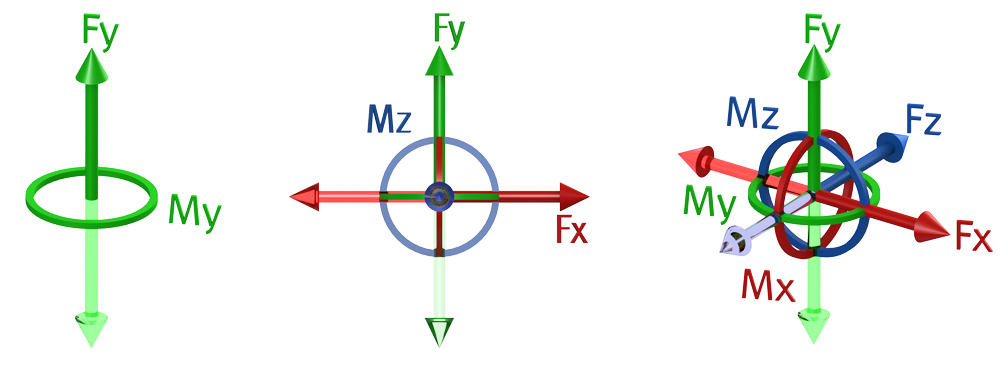
Principle sketch: Force as a vector quantity acts in all directions
Uniaxial force measurement
As a rule, a force transducer with a uniaxial force measurement is sufficient, especially if the sensor is able to measure bidirectionally with sufficient accuracy. Most universal testing machines are equipped with such force sensors. Bidirectional force sensors with strain gauges are also mostly used in digital force gauges.
Measuring principles in force measurement
Elastic deformation with displacement measurement
Here, as an elastic body , a coil spring, for example, is deformed by an acting force (F). In the elastic range of this spring body, Hook's law applies , which describes that the quotient of the increase in force and the increase in length is constant.
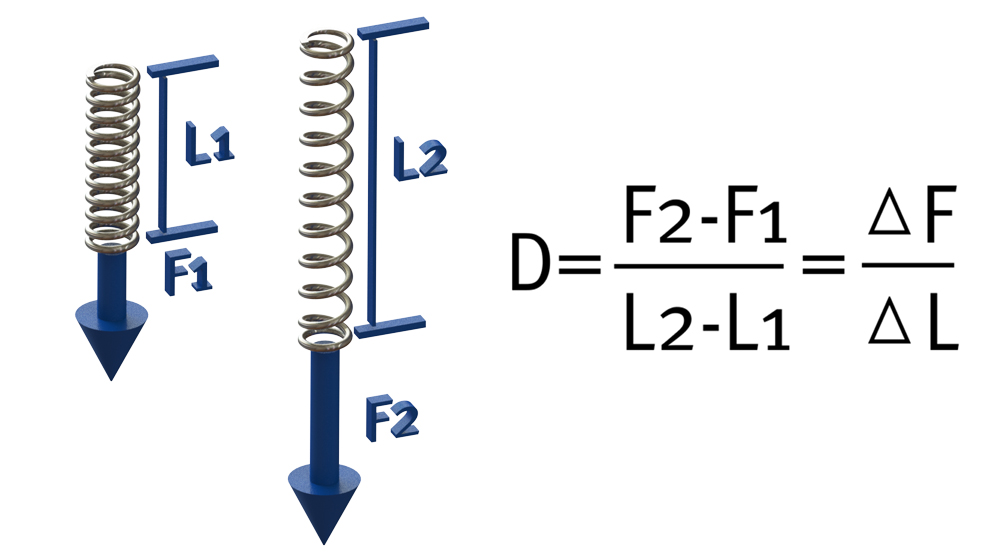
Principle sketch: Force measurement according to Hook's law
Instead of a spiral spring, another (metallic) body can also be used to measure the force, provided the acting force does not cause plastic deformation and Hooke's law can be applied.
Elastic deformation with resistance measurement
Based on the elastic deformation of a body under the action of force according to Hook's law, the force transducer also works with strain gauges. For this purpose, a spring body is designed in such a way that individual narrowly defined areas of the body are subject to relatively strong deformation when force is applied.
This stretches or compresses the surface of the body in this area. Resistance in the form of a strain gage is applied at the point of maximum elongation, the electrical resistance (R) of which increases with increasing elongation.
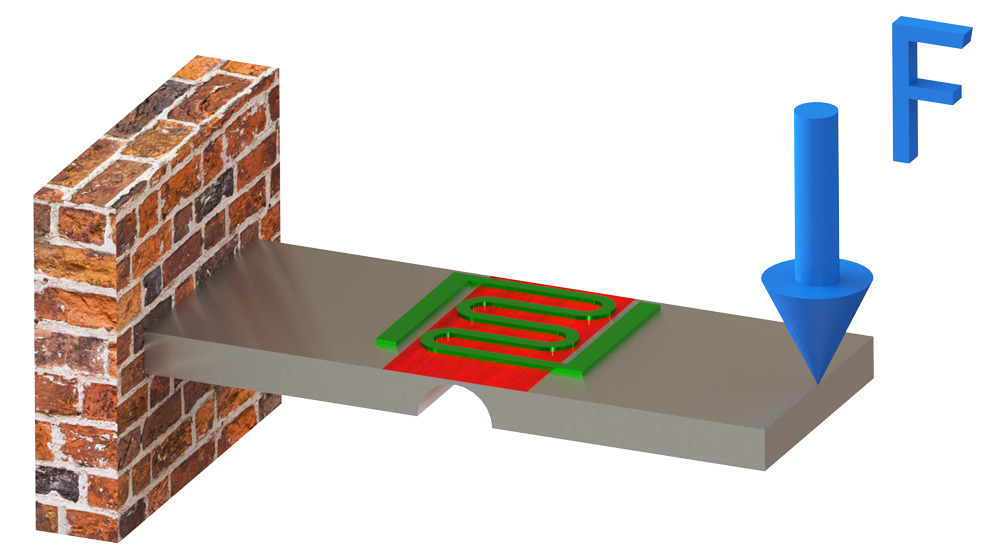
Sketch: spring body - bending beam
This measuring principle can be found in many force transducers , although the basic construction of the spring body can vary greatly depending on the area of application. In order to achieve sufficient linearity of the measured deformation in relation to the force introduced, several individual strain gages are usually used and interconnected.
Piezoelectric Effect
In addition to force transducers based on strain gages, sensors based on the piezoelectric effect are used to a greater extent. Here, two piezo elements separated by an electrode are connected to a charge amplifier. When the force acts on these two bodies, a proportional electrical voltage is created. Piezo sensors have the advantage that they are hardly deformed under load and can be built very flat even with high forces.
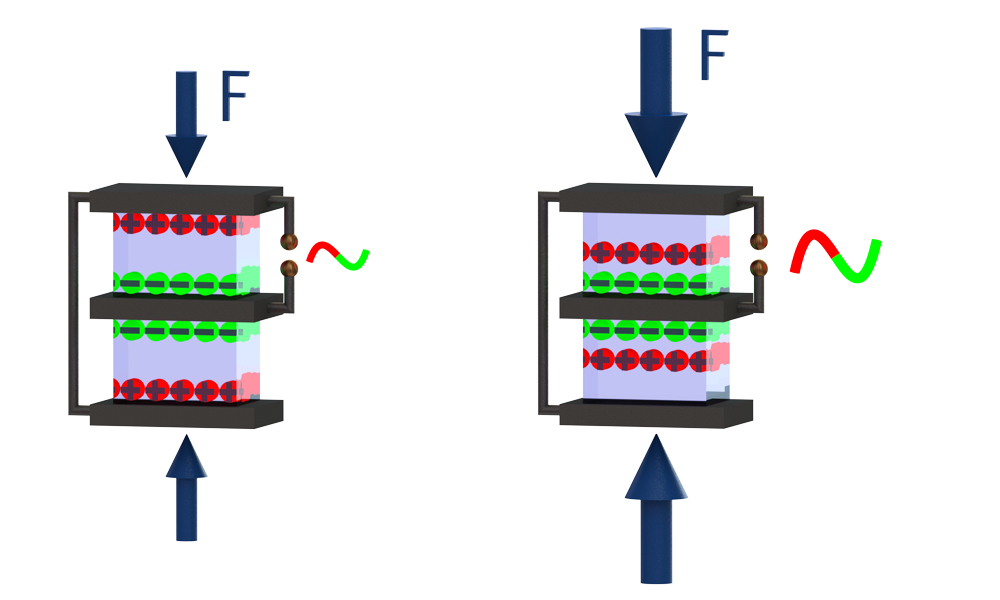
Principle sketch: Piezoelectric effect with charge transfer under pressure
Due to the inherently high drift, piezoelectric force transducers cannot be used for static or quasi-static force measurement. The main areas of use for these force sensors are therefore applications in which rapid load changes or short force peaks occur.
Force sensors based on resistance measurement are used in force measuring devices and in force transducers for universal testing machines, as well as in all applications in which higher demands are made on accuracy, reproducibility and traceability to the standards of the PTB or other metrological institutes.
Other procedures
In addition to the methods described above, there are other measuring principles that are used less frequently or can only be used to a very limited extent. Which includes:
- Optical DMS (Fiber Bragg Grating)
- Frequency measurement to determine the clamping force
- Electromagnetic compensation
- Magnetoelastic effect for very high forces